ABOUT ME
My name is Ilker Bozcan. I am professional machine learning and computer vision engineer.
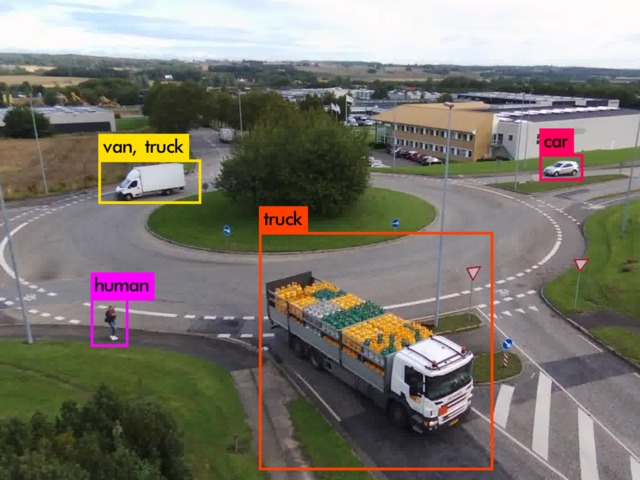
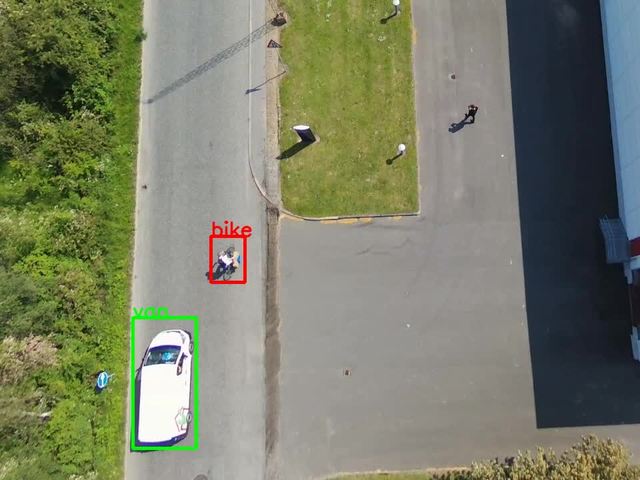
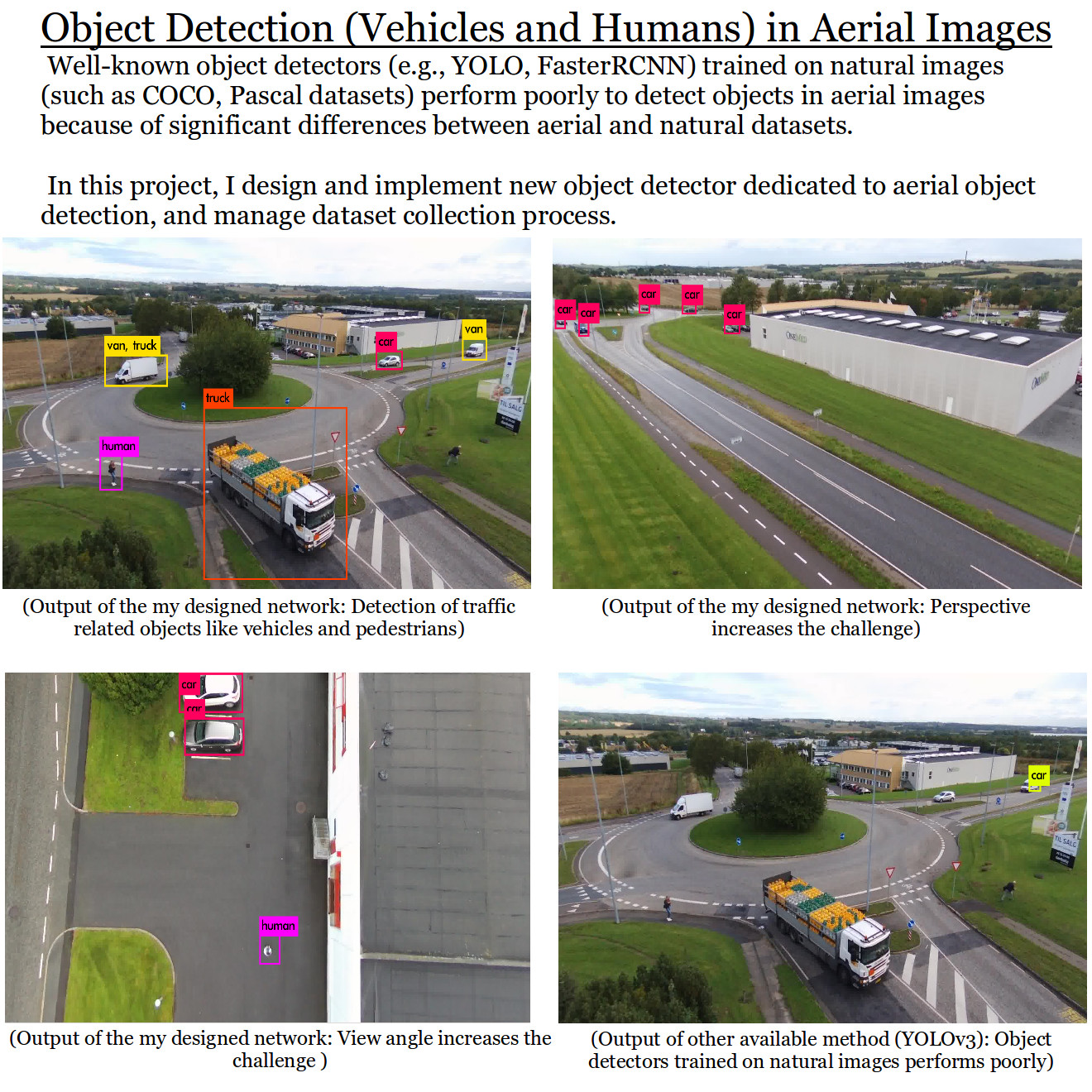
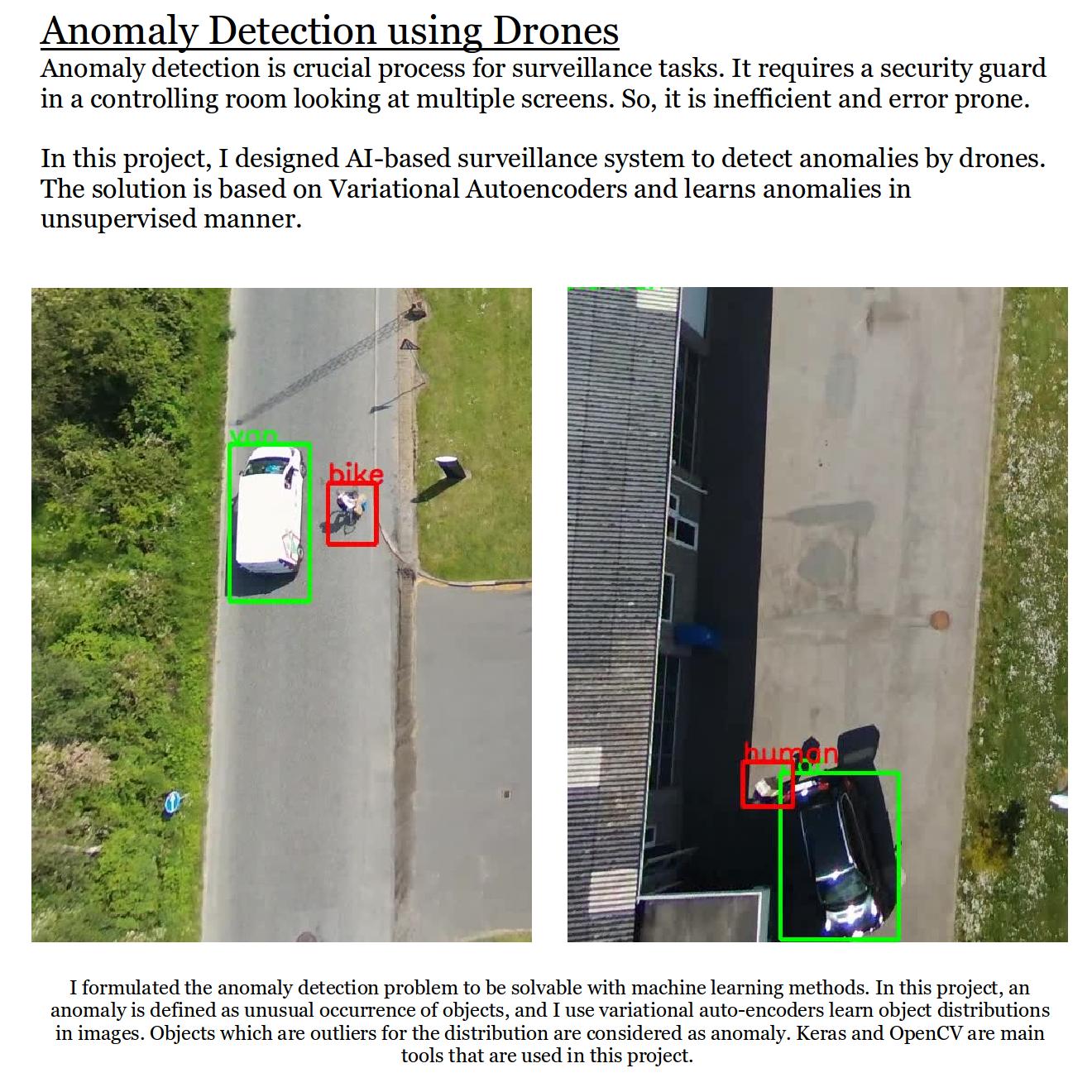
Currently, I am conducting my Ph.D. research on analyzing aerial images captured by drones. More specifically, I am working on object detection in challenging aerial images, and anomaly detection for aerial surveillance (finding suspucious objects, events, actions in a crowd).
I also design and develop machine learning-based solutions for my clients in my freetime, mostly for visual recognition. I like using my research and engineering skills for usefulness.

MY SERVICES
I help my clients to develop AI-based visual recognition systems for their services or products.
ML Development
Design, develop and optimize machine learning algorithms for different domains.
Object Detection
Identify object categories in images with the location of each object instance.
Semantic Segmentation
Label and predict objects at the pixel level, and segment image regions.
Data Classification
Classify data (image, audio, stock) into predefined categories.
Dataset Analysis
Analyze requirements of datasets and optimize data gathering process.
Research for Industry
Survey the literature for state-of-the-art methods to adapt the business.
{kind=link}
{kind=link}
{kind=link}
MY PUBLICATIONS
CONTACT ME
Turing 0, Building 5341, Aabogade 34, 8200 Aarhus N, Denmark
+45 50 35 86 72
ilker@eng.au.dk
ilkerbozcan@hotmail.com